1-2. 작업 및 운용 환경 분석
학습 목표
• 선별된 고객 요구 사항을 바탕으로 로봇에 요구되는 성능 및 요구 사항을 분석하고, 지표화할 수 있다.
• 로봇이 수행할 공정을 파악하여, 물리적 동작 방법을 분석할 수 있다.
• 로봇이 운용되는 데 필요한 각 기능을 쉽게 사용 및 운용이 가능한 방법을 도출할 수 있다.
• 개발 로봇의 운용 환경을 파악할 수 있다.
• 개발 로봇의 사용자 범위를 파악할 수 있다.
• 개발 로봇의 운용 시 발생할 수 있는 위험인자를 사전 분석하여, 각 위험인자를 방지 및 보완할 수 있는 방안을 확보할 수 있다.
필요 지식
① 로봇 응용 분야
로봇은 적용되는 분야에 따라 산업용, 전문 서비스용, 개인용 로봇으로 분류할 수 있다.
1. 산업용 로봇
가공 및 조립 공정 분야의 초창기에는 대량 생산 체제를 갖춘 기계 부품, 전자 제품, 자동차 생산 라인에서 단순 가공·조립 공정 작업에 적용되었다. 최근에는 고속 정밀화 및 지능화 기능을 갖추고 다양한 형태의 작업이 가능하게 되어 적용 영역의 범위를 확대하고있다. 가공 및 조립 공정에서는 고속이 우선적으로 요구되기 때문에 SCARA 로봇이나 직교 로봇이 주로 사용된다. 최근에는 병렬 로봇이 개발되어 조립 공정 분야에 적용되고 있다. 물류 및 핸들링 공정 분야의 초창기에는 기계 가공 라인이나 가전 제품 생산 라인에서 직교 로봇에 의해 핸들링 작업이 많이 이루어졌다. LCD, 반도체 생산라인에서 6축 다관절 이외에도 다양한 형태의 로봇이 등장하여 고중량물이나 다양한 형태의 공작물을 핸들링할 수 있다.
용접 및 도장 공정 분야의 초창기에는 주로 다관절로봇을 이용하여 자동차 생산 라인의 스폿 용접 공정에 많이 적용되었으나 최근에는 레이저 용접 공정에도 적용되고 있다. 특히, 다양한 형태의 로봇이 등장하여 선박 제조의 용접 및 도장 공정에 적용되어 생산성 향상을 꾀하고 있다. 제조업용 로봇의 기능에서도 고속정밀화, 지능화가 이루어져 스마트폰이나 바이오(bio), 신약 제조 공정과 같은 복잡한 작업의 경우에도 제조업용 로봇의 도입이 활발하게 이루어지고 있다.
2. 전문 서비스용 로봇
재난 극복 로봇 분야에는 화재 감시 및 진압 로봇, 매몰자 수색 로봇, 구조물 검사 로봇, 수중 인명 탐색·구조 로봇 등이 있다. 군사용·사회 안전 로봇 분야에는 정찰 로봇, 전투 로봇, 병사 지원 로봇, 화생방 로봇, 지뢰⋅폭발물 처리 로봇, 스마트 경비 로봇 등이 있으며, 활선 작업용 로봇 분야에는 전선로 전선 보수 로봇, 애자 검사⋅청소 로봇 등이 있다. 또 건설 작업용 로봇 분야에는 대형 구조물 외벽 작업 로봇, 터널 유지 보수 로봇, 관로 매설 및 검사⋅보수 로봇, 콘크리트 평면 타설⋅바닥 마감 로봇, 조선 선박 배관 및 탱크 검사 로봇 등이 있으며, 의료용 로봇 분야에는 수술 로봇, 진단 로봇, 재활 기능 지원 시스템, 지능형 개인 맞춤 의약 로봇, 신약 개발 로봇 등이 있다.
3. 개인 서비스용 로봇
청소 및 경비 로봇 분야에는 고성능 청소 로봇, 원격제어⋅모니터링 로봇, 침입 감지 경비 로봇, 자기 방어 경비 로봇, 홈 네트워크 연동 청소⋅경비 로봇 등이 있다. 여가 지원 로봇 분야에는 건강 모니터링⋅케어 지원 로봇, 인간 로봇 인터렉션에 의한 오락 지원 로봇, 자세 교정 및 상호 작용에 의한 운동 지원 로봇 등이 있으며, 노약자 재활 지원 로봇 분야에는 지능형 보행 보조 로봇, 노약자 건강 관리 로봇, 노약자 생활 지원 로봇 등이 있다. 또 교육용 로봇 분야에는 학습 보조 로봇, 가정 교사용 로봇 등이 있으며, 가사 지원 로봇 분야에는 단순 서비스형 가사 지원 로봇, 지능형 가사 지원 로봇 등이 있다.
수행 내용 / 작업 및 운용 환경 분석하기
재료·자료
Ÿ 로봇 시장 동향 분석 자료
Ÿ 로봇 기술 분석 자료
Ÿ 로봇 관련 특허 분석 자료
기기(장비 ・공구)
Ÿ 컴퓨터, 프린터, 인터넷
Ÿ 사무용 프로그램, 통계 프로그램
안전 ・유의 사항
Ÿ 작업 환경 및 운용 환경을 분석할 때에는 학습자의 과거 경험에 기반한 주관이 개입되지 않도록 조심하여야 한다.
Ÿ 학습자와 적용할 공정 운영 담당자 간에 용어에 대한 오해가 생기지 않도록 적용 공정에서 사용되는 용어에 대해 정확하게 이해하여야 한다.
수행 순서
① 적용할 공정과 작업의 특성에 대해 분석한다.
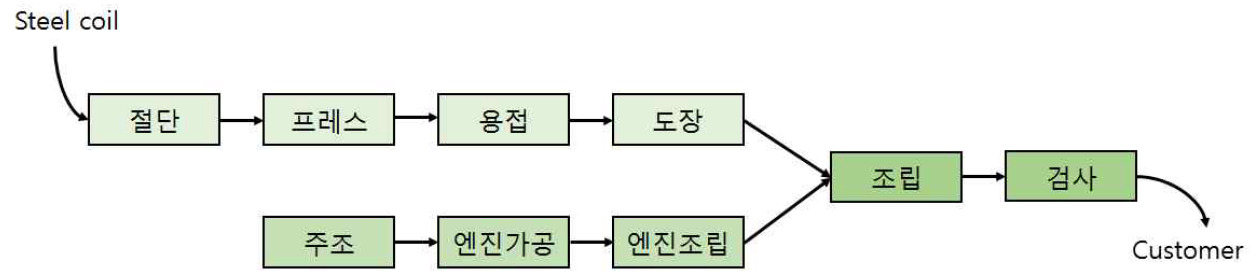
먼저 적용할 공정과 작업의 특성에 대해 분석한다. 공정 분석이란 [그림 1-2]와 같이 대상물이 어떤 경로로 처리되었는지를 발생 순서에 따라 분류하고, 각 공정 조건(가공 조건, 경과 시간, 이동 거리 등)과 함께 분석하는 것이다. 작업 분석이란 [그림 1-3]과 같이 공정을 구성하고 있는 개개의 작업에 대한 작업 방법을 분석하는 것이다. [그림 1-2]는 자동차 공장의 공정을 간략하게 나타내고 있는데, 차체를 제작하기 위하여 강철을 절단, 프레스, 용접, 도장을 하는 공정 흐름을 보여주고 있다.
[그림 1-3]은 용접 공정에서의 작업 순서를 보여주고 있다. 용접 공정에서는 여러 개의 부품을 차례대로 용접을 하게 되는데, 각 용접 작업은 용접해야 할 부품을 집고, 공구를 들고, 용접을 하고, 부품을 내려놓는 순서로 진행됨을 보여주고 있다.


[그림 1-3] 자동차 생산 공장에서 용정 공정의 작업 분석 예
② 공정 분석 결과를 바탕으로 공정에서 로봇을 운용하는 데 필요한 로봇 시스템의 기능을 도출한다.
로봇 시스템은 적용할 공정과 작업에 따라 로봇 시스템에서 요구하는 중요한 요구 사항, 즉 로봇의 형상, 가반 하중, 속도, 작업 반경 등이 결정된다.
적용 공정에 적합한 로봇 시스템의 기능을 직관적으로 이해하는 것은 매우 어렵다. 이러한 로봇 시스템의 기능에 대한 분석은 로봇 SI(system integration) 엔지니어와 공정 및 작업 분석 엔지니어 간의 무수한 협의를 통해서 이루어진다.
일반적으로 적용 공정에 로봇 시스템을 설치해 본 로봇 SI 엔지니어가 있거나, 이미 설치가 되어 있는 로봇 적용 공정을 눈으로 볼 수 있다면 로봇 시스템의 기능을 분석하는 것은 그렇게 어렵지 않다. 그러나 그런 상황이 되지 못한다면 많은 브레인스토밍을 통하여적용 공정에 적합한 로봇 시스템을 개발하여야 할 것이다.
[그림 1-4]는 자동차 공장에서 아크 용접의 예를 보여준다. 아크 용접은 주로 자동차, 조선이나 일반 기계의 부품을 제작하는 곳에서 두꺼운 금속성의 판재에 토오치(torch)를 통해 아크를 발생시켜 용접하여 접합시키는 방법이다.
이러한 아크 용접을 구현하기 위해서는 실시간으로 용접 전압과 전류의 변경이 가능해야하고, 각종 용접 데이터베이스(database)를 이용하여 아크 용접 조건 설정이 가능해야 한다. 또 토치 감지, 아크 감지, 위빙(weaving) 기능뿐만 아니라 용접기 주변기기의 교시 기능이 구현되어야 한다. 따라서 각종 아크 용접 발생 장치 중의 하나인 와이어 공급기를 다관절 로봇의 상단 혹은 내부에 배치하고, 로봇 끝단에 토치 및 충격 센서 등을 부착하여, 용접 작업 중에는 용접 궤적을 추적하기 위해 연속 경로(continuous path) 동작올 수행할 수 있도록 하여야 한다.
일반적으로 아크 용접은 좁은 공간에서 수행되며 로봇에 부착되는 용접 장치의 중량이 가벼우므로 가반 하중이 5-10kg의 소형 다관절 로봇이 주로 사용된다. 또 자동차 용접 라인에서 다수의 부품이 자동차의 본체에 용접으로 접합되어야 한다. 따라서 자동차의 생산속도를 맞추려면 여러 대의 용접 로봇을 양쪽에 배치하여 동시에 용접이 이루어지도록 하
는 것이 용이하다.


[그림 1-6]은 프레스 공정에서 로봇의 적용 예를 보여준다. 프레스 공정은 수십에서 수천톤의 프레스를 이용하여 다양한 소재의 제품을 열간 또는 냉간 소성 가공하는 작업이다. 프레스 공정의 경우 부품의 크기는 수십 g에서 수십 kg으로 그렇게 무겁지는 않지만, 매우 빠른 속도로 작업이 이루어지기 때문에 손가락 절단과 같은 산재가 많이 발생되는 환경이다. 따라서 그림과 같이 프레스 기계 앞에 2대의 다관절 로봇을 배치하여 프레스 작업을 수행한 후 한 대의 로봇은 완제품을 꺼내고 다른 로봇은 재공품을 넣는 역할을 하게되면 이러한 문제를 해결할 수가 있다.

수행 tip
• 공정에서 로봇을 운용하는 데 필요한 로봇 시스템의 기능을 도출하는 가장 좋은 방법은 유사한 로봇 시스템이 설치 운영되고 있는 곳을 방문해 보는 것이다.
• 로봇 시스템을 운용할 사용자에 대한 분석도 매우 중요하다. 만약 로봇을 운용할 사용자가 로봇에 대한 비전공자일 수도 있기 때문에, 비전공자가 조작 할 수 있도록 로봇 시스템을 개발해야 한다.
'Robotics : 로봇공학 > Certificate : 자격증' 카테고리의 다른 글
| 학습 1 - 로봇 소프트웨어 요구 사항 정의하기 (0) | 2023.02.13 |
|---|---|
| 로봇 시제품제작 및 통합 - 4. 로봇시스템 조립 및 통합하기 (0) | 2023.02.09 |
| 1. 요구 사항 파악 및 작업 분석하기 - 1-1. 요구 사항 파악 (0) | 2023.02.05 |
| 2-1-3 로봇 소프트웨어 계측 구조, 미들웨어 구현 위한 운영체제 설치 (3) | 2023.02.02 |
| 2-1-2 시스템 아키텍처, 특성, 설계방법 (2) | 2023.02.01 |



